Ward-Cherrier, B., Pestell, N., Cramphorn, L., Winstone, B., Giannaccini, M.E., Rossiter, J. and Lepora, N.F., (2018).
The tactip family: Soft optical tactile sensors with 3d-printed biomimetic morphologies.
Soft robotics, 5(2), pp.216-227.
Giannaccini, M.E., Xiang, C., Atyabi, A., Theodoridis, T., Nefti-Meziani, S. and Davis, S., (2018).
Novel design of a soft lightweight pneumatic continuum robot arm with decoupled variable stiffness and positioning.
Soft robotics, 5(1), pp.54-70.
Hao, L., Xiang, C., Giannaccini, M.E., Cheng, H., Zhang, Y., Nefti-Meziani, S. and Davis, S., (2018).
Design and control of a novel variable stiffness soft arm.
Advanced Robotics, 32(11), pp.605-622.
Xiang, C., Giannaccini, M.E., Theodoridis, T., Hao, L., Nefti-Meziani, S. and Davis, S., (2016).
Variable stiffness Mckibben muscles with hydraulic and pneumatic operating modes.
Advanced Robotics, 30(13), pp.889- 899.
Giannaccini, M. E., Georgilas, I., Horsfield, I., Peiris, B. H. P. M., Lenz, A., Pipe, A. G., & Dogramadzi, S. (2014).
A variable compliance, soft gripper.
Autonomous Robots, 36(1-2), 93-107.
Joel William Currie, Katrina McDonough, Agnieszka Wykowska, Maria Giannaccini, Patric Bach
More Than Meets the Eye? An Experimental Design to Test Robot Visual Perspective-Taking Facilitators Beyond Mere-Appearance
HRI2024 conference
- view publication
Joel Currie, Maria Elena Giannaccini, Patric Bach
Sonic Sleight of Hand: Sound Induces Illusory Distortions in the Perception and Prediction of Robot Action
International Journal of Social Robotics
- view publication
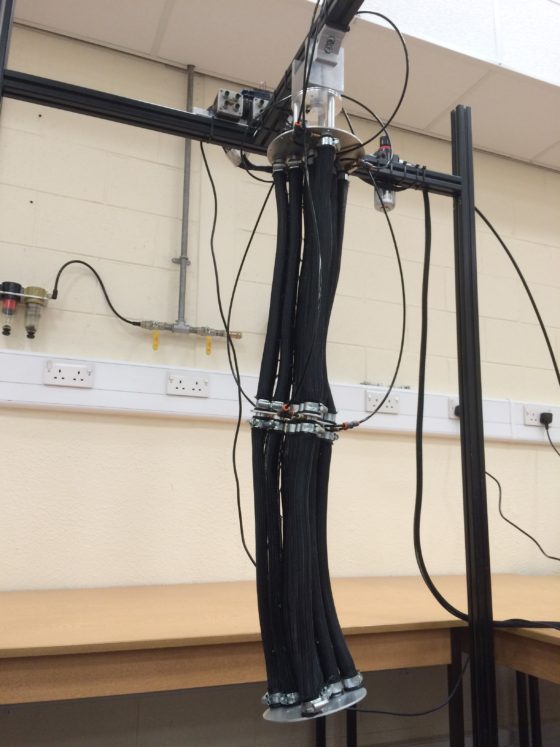
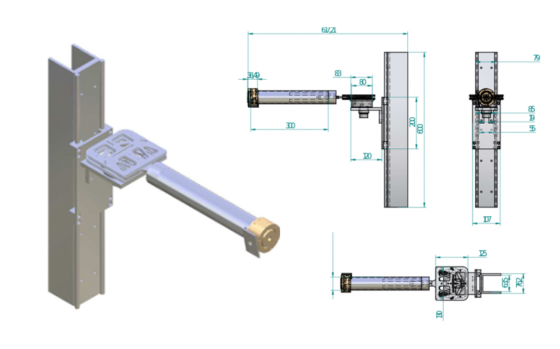
Maria Elena Giannaccini, Andrew Hinitt, Andrew Stinchcombe, Keren Yue, Martin Birchall, Andrew Conn, Jonathan Rossiter
A Bioinspired Active Robotic Simulator of the Human Respiratory System
IEEE Transactions on Medical Robotics and Bionics
- view publication
James Greig, Maria Elena Giannaccini, Edward Chadwick
Coupled, closed-system fluidic actuators for use in wearable rehabilitation devices
ICRA23 conference
- view publication
Victor Yanev, Maria Elena Giannaccini, Sumeet S Aphale
Control of a Soft Actuator using a Long Short-Term Memory Neural Network
2022 26th International Conference on Methods and Models in Automation and Robotics
- view publication
Nikita Murasovs, Maria Elena Giannaccini, Sumeet S Aphale
Switching Control in Two-Wheeled Self-Balancing Robots
ICRA21 conference
- view publication